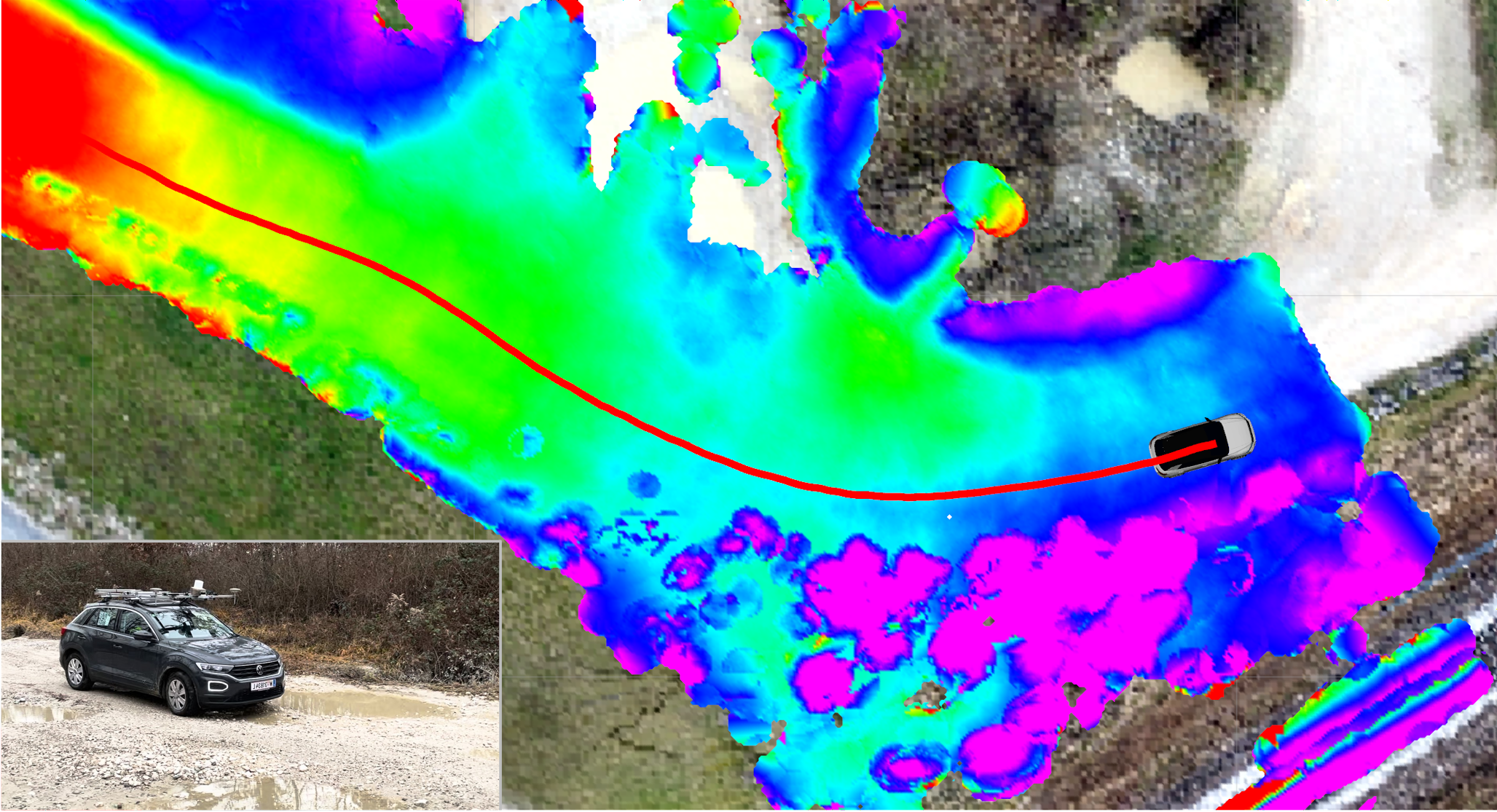
Jüngste Fortschritte in der 3D-Kartierungstechnologie geben dem Bereich der autonomen Navigation neue Impulse. Ein herausragender Beitrag zu diesem Bereich stammt von den AIT Forschern Philipp Glira, Christoph Weidinger und Clemens Hofbauer, die für ihr Paper auf der IEEE International Radar Conference 2023 in Sydney als Verfasser eines der besten Konferenzbeiträge ausgezeichnet wurden. Ihr Beitrag, mit dem Titel "Robust 3D Mobile Mapping with Radar Sensors: A Real-Time Approach for Autonomous Navigation", präsentiert einen innovativen Ansatz zur Erzeugung von Höhenkarten aus 3D-Radar-Punktwolken für autonome Fahrzeuge, Arbeitsmaschinen und andere robotische Systeme. Mit der vorgestellten Methode konnten die Forscher zeigen, dass eine grobe 3D-Rekonstruktion der Umgebung mit Radar-Sensorik auf mobilen Plattformen möglich ist. Ihre Erkenntnisse tragen maßgeblich dazu bei, die Effizienz und Zuverlässigkeit autonomer Navigationssysteme weiter zu verbessern.
Robuste 3D-Kartierung auch in herausfordernden Umgebungen und bei schwierigen Wetterbedingungen
Traditionell setzte man für eine dichte Umgebungsrekonstruktion bevorzugt Stereokameras und Lidar-Sensoren ein. Diese Sensoren liefern zwar genaue Informationen über die Umgebung, jedoch nur bei günstigen Wetterbedingungen. D.h. sind die Sichtbedingungen schlecht, sind die Systeme in ihrer Funktionsfähigkeit stark eingeschränkt. Im Gegensatz dazu arbeiten Radarsensoren mit Wellenlängen, die die Auswirkungen einer schlechten Sicht erheblich abmildern. Daher stellen sie eine vielversprechende und robuste Alternative zu Lidar-Sensoren und Kameras dar.
In ihrem Paper präsentieren die Forscher eine Echtzeit-Verarbeitungspipeline für die Umgebungserfassung autonomer Fahrzeuge und für die Robotik. Dabei werden insbesondere die spezifischen Eigenschaften der Radar-Sensorik berücksichtigt. Denn Radar-Messungen sind zwar weitgehend immun gegenüber äußeren Verhältnissen wie Regen oder Schnee, sind aber im Vergleich zu Lidar-Messungen wesentlich ungenauer. Diese Messunsicherheit wird bei der Erzeugung der 3D-Umgebungskarte modelliert und in einem Optimierungsverfahren berücksichtigt.
Wie man im folgenden Video sehen kann, erfolgen diese Berechnungen in Echtzeit:
Wir gratulieren den drei Wissenschaftlern Philipp Glira, Christoph Weidinger und Clemens Hofbauer sowie ihrem Team herzlich zu diesem Erfolg!
https://www.radar2023.org/best-conference-papers/