Vor dem Hintergrund von Ressourceneffizienz, Fachkräftemangel und nachhaltiger Produktion gewinnt die Automatisierung von optischen Qualitätsprüfungsprozessen in der Fertigungsindustrie und die dafür notwendigen Forschungsarbeiten wie jene von Vanessa Staderini zunehmend an Bedeutung.
Vanessa Staderini forscht am Center for Vision, Automation & Control des AIT Austrian Institute of Technology. In ihrer Doktorarbeit, die Prof. Andreas Kugi betreut, entwickelt sie Verfahren für eine automatisierte optische 3D Inspektion, um sowohl die Objekt-Geometrie als auch Oberflächendefekte von 3D Objekten effizient und vollständig zu erfassen. Der Forschungsschwerpunkt liegt dabei auf der Pfadplanung und der robotergestützten, optischen Datenerfassung.
Nun hat sie erste Ergebnisse auf der 13. IEEE International Conference on Pattern Recognition Systems (ICPRS) vorgestellt und als wissenschafltichen Beitrag mit dem Titel „Surface Sampling for Optimal Viewpoint Generation“ veröffentlicht. Mit ihrer Arbeit hat sie die Jury überzeugt und den Best Student Paper Award gewonnen.
Zum wissenschaftlichen Beitrag “Surface sampling for optimal viewpoint generation“
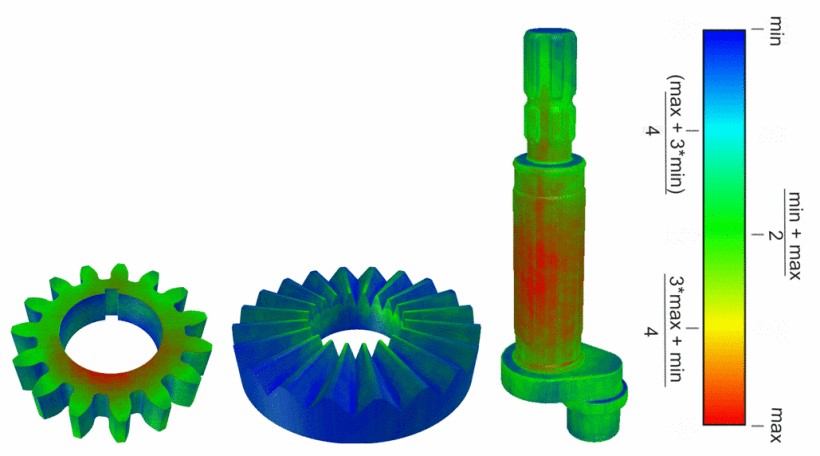
Gemeinsam mit T. Glück, P. Schneider, R. Mecca und A. Kugi stellt Vanessa Staderini in dem Paper einen neuen Algorithmus zur Generierung von Kamerapositionen (Blickpunkten) vor, der die Objektgeometrie und das optische Sensormodell berücksichtigt. Dieser Algorithmus bietet eine hohe räumliche Abdeckung und ist gleichzeitig robust gegenüber Verdeckungen, wenn er auf Objekte unterschiedlicher Komplexität angewendet wird. Dieser Ansatz verwendet Techniken wie Poisson Disk Sampling und optisches Raytracing, um ein binäres Optimierungsproblem zu formulieren. Die numerische Lösung des Optimierungsproblems führt zu einer minimalen Anzahl von Kamerapositionen, welche eine maximale räumliche Abdeckung des Objekts liefern. Dies ermöglicht eine vollständige optische Erfassung in minimaler Zeit.
Eine Besonderheit dieses Verfahrens ist, dass keine aufwendige Vorverarbeitung des CAD-Modells des Prüfobjekts erforderlich ist. Bemerkenswert ist, dass auch für komplexe 3D Geometrien eine vollständige räumliche Abdeckung erreicht wird. Diese Aussage wird durch Simulationsergebnisse untermauert, welche die Leistungsfähigkeit im Vergleich zu bisher in der Literatur dokumentierten Ergebnissen belegen.

„Ich freue mich sehr über diese Auszeichnung. Wir haben hart daran gearbeitet, dass unsere Forschungsergebnisse nicht nur fachlich fundiert, sondern auch für ein breites Publikum verständlich aufbereitet sind. Es ist toll zu sehen, dass dies anerkannt und unsere Arbeit von der internationalen wissenschaftlichen Gemeinschaft positiv bewertet wurde. Für mich ist es eine Bestätigung und bestärkt mich in meiner Leidenschaft für die Forschung und motiviert mich, die Grenzen des Wissens auf dem Gebiet weiter zu erweitern. Der Award ist auch ein Spiegel unseres Engagements am AIT. Im Team und als Forschungseinrichtung haben wir uns Spitzenleistungen auf die Fahne geschrieben. Die Bedürfnisse der Industrie im Auge behaltend, leisten wir sowohl für sie als auch in der wissenschaftlichen Community wissenschaftliche Exzellenz.“
Herzlichen Glückwunsch zu diesem Erfolg!
Über Vanessa Staderini
Vanessa studierte Biomedizintechnik in Pisa und erwarb einen MSc in Robotik und Automatisierung an der Universität Pisa.
Für ein Auslandssemester war sie als Austauschstudierende am Beijing Institute of Technology in China.
Seit November 2021 verstärkt sie das Team am AIT Center for Vision, Automation & Control (VAC). Mit ihrem Dissertationsvorhaben verknüpft sie die robotische Pfadplanung und die automatisierte, optische Qualitätsinspektion – beides Schwerpunkte am VAC.
Paper
V. Staderini, T. Glück, P. Schneider, R. Mecca and A. Kugi, "Surface sampling for optimal viewpoint generation," 2023 IEEE 13th International Conference on Pattern Recognition Systems (ICPRS), Guayaquil, Ecuador, 2023, pp. 1-7, doi: 10.1109/ICPRS58416.2023.10179043.